Verification Test 1 is the most simple type of 3D rotational transformation with a
single rotation about the Z axis. This test has two cases: Case 1 computes the
components of a fixed vector in a rotated reference frame. Case 2 computes the
components of a rotated vector given the unrotated vector components in the same
reference frame. Exact solutions for this problem are done manually and then
compared against the QuatView results. The manual solutions are done using two
methods: the rotation matrix and the rotation quaternion. The QuatView results
agree precisely with both manual solutions which verifies that the QuatView vector
rotation calculations are correct.
Given:
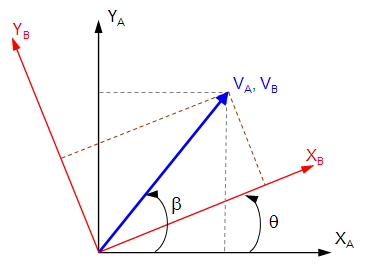
1. Two 3D right-handed Cartesian reference frames, Frame A and Frame B, with
Frame B oriented at a counterclockwise angle of 30° about the Z axis of
Frame A (see Figure C1-1).
2. A fixed 3D vector with coordinates given in Frame A as (0.6, 0.8, 0.0).
Find:
1. The vector coordinates with respect to Frame B.
2. The vector coordinates with respect to Frame A if the vector is not fixed and
instead rotates counterclockwise with an angle of 30°.
Solution:
Case 1:
Case 1 considers a fixed 3D vector that is defined with respect to Frame A as
VA = (0.6, 0.8, 0.0).
Another frame, designated as Frame B, is rotated by a counterclockwise angle, q =
30° about the Z axis with respect to Frame A. The objective of this case is to
determine the components of the vector V with respect to Frame B.
The input vector, V, has a magnitude of unity and an angle b of 53.13° with respect
to the XA axis. Figure C1 shows V, Frame A, and Frame B, along with the angles q
and b.
The solution to this problem is computed manually using two methods: the rotation
matrix and the rotation quaternion. The results from these two methods are then
compared against the output from QuatView.
A) DCM Solution:
The basic formula for doing a rotational transformation on a vector is
 (C1-1)
(C1-1) where VA is the vector with respect to Frame A, VB is the vector with respect to
Frame B, and  is the DCM that defines the orientation of Frame B with respect
to Frame A. Each element of the DCM is given by cos(aij), where
is the DCM that defines the orientation of Frame B with respect
to Frame A. Each element of the DCM is given by cos(aij), where  is the angle
between the i'th axis of Frame B and the j'th axis of Frame A. The matrix row
number is i and the column number is j. So, looking at Figure C1-1, the first
element of the first row is the cosine of the angle between axes XB and XA which
gives cos(q). Similarly the second element of the first row is the cosine of the angle
between axes XB and YA which gives cos(90-q) which is equal to sin(q). Finally, the
third element of the first row is the cosine of the angle between axes XB and YA
which gives cos(90)=0. Using this approach for the remaining rows, all of the
elements of the DCM can be computed as
is the angle
between the i'th axis of Frame B and the j'th axis of Frame A. The matrix row
number is i and the column number is j. So, looking at Figure C1-1, the first
element of the first row is the cosine of the angle between axes XB and XA which
gives cos(q). Similarly the second element of the first row is the cosine of the angle
between axes XB and YA which gives cos(90-q) which is equal to sin(q). Finally, the
third element of the first row is the cosine of the angle between axes XB and YA
which gives cos(90)=0. Using this approach for the remaining rows, all of the
elements of the DCM can be computed as
 (C1-2)
(C1-2)
Eqn. C1-2 is the general DCM for expressing the coordinates of any vector in a
rotated frame where the rotation is a counterclockwise angle, q, about the Z axis of
the original (unrotated) frame. Note that this equation is only valid if both frames
have right-handed coordinate systems.
Figure C1-1. Verification Test 1, Case 1 - V Is Fixed To Frame A
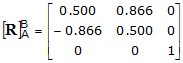
Plugging the given value for q=30° into Eqn. C1-2 gives the DCM as
Using this DCM in Eqn. C1-1 and performing the matrix multiplication then gives the
following values for the vector components in Frame B:
Therefore, the requested vector components with respect to Frame B are
VB = (0.9196, 0.3928, 0.0000) <-------ANSWER
B) Quaternion Solution:
The same solution can be computed with quaternions using the quaternion rotation
formula
 (C1-3)
(C1-3) where (VA) and (VB)
are pure quaternions containing the vector components VA and
VB,  is the rotation quaternion defining the orientation of Frame B with respect to
Frame A,
is the rotation quaternion defining the orientation of Frame B with respect to
Frame A,  is the quaternion multiplication operator, and * is the quaternion
conjugate operator.
is the quaternion multiplication operator, and * is the quaternion
conjugate operator. The rotation quaternion that represents the orientation of Frame B with respect to
Frame A is given by the standard formula
 (C1-4)
(C1-4) where q is the counterclockwise angle about the rotation axis from Frame A to Frame
B and  are the components of the rotation axis. Since the rotation axis for
this problem is the Z axis of Frame A, the rotation axis vector is simply (0,0,1). This
means that the quaternion components q1 and q2 are zero, and component q3 is
given by
are the components of the rotation axis. Since the rotation axis for
this problem is the Z axis of Frame A, the rotation axis vector is simply (0,0,1). This
means that the quaternion components q1 and q2 are zero, and component q3 is
given by q3 = sin(q/2) = sin(15)
= 0.2588
The scalar component, q0, is then
q0 = cos(q/2) = cos(15)
= 0.9659
The quaternion that defines the orientation of Frame B with respect to Frame A is
then
 = (0.9659, 0.0, 0.0, 0.2588)
= (0.9659, 0.0, 0.0, 0.2588) The pure quaternion for (VA) is simply
(VA) = (0.00, 0.60, 0.80, 0.00)
Plugging these values for (VA) and  into Eqn. C1-3 gives
into Eqn. C1-3 gives  = (0.9659, 0.0, 0.0, 0.2588)
= (0.9659, 0.0, 0.0, 0.2588)  (0.00, 0.60, 0.80, 0.00)
(0.00, 0.60, 0.80, 0.00)  (0.9659, 0.0,
0.0, -0.2588)
(0.9659, 0.0,
0.0, -0.2588) Performing the two quaternion multiplications in accordance with Eqn. 2 involves a
fairly lengthy amount of algebra, all of which will not be repeated here. The end
result of the quaternion multiplications is
 = (0.00, 0.9196, 0.3928, 0.00)
= (0.00, 0.9196, 0.3928, 0.00) Separating out the vector from the pure quaternion then gives the following final
answer for the vector components in Frame B:
VB
= (0.9196, 0.3928, 0.0000) <-------ANSWER
This answer agrees precisely with the answer from the DCM solution, which is to be
expected.
C) QuatView Solution:
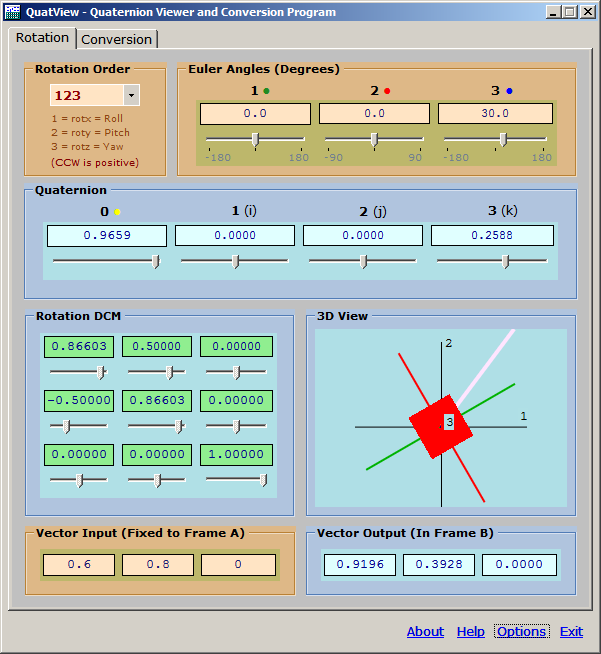
Figure C1-2 shows the QuatView screen shot for this verification problem. The
orientation of Frame B with respect to Frame A is defined by the three Euler angles
entered as (0.0, 0.0, 30.0). The input vector, which is defined in Frame A as (0.6,
0.8, 0.0), must also be entered.
Figure C1-2. QuatView Results For Case 1 (Fixed Vector in Rotated Frame)
Vector plotting is also turned on using the Options dialog. The vector initial
reference frame must also be set to the default setting of "Frame B (Rotating)" using
the Options dialog.
Once the Frame B orientation and vector components are entered, then QuatView
automatically displays the complete solution which includes the Frame B orientation
quaternion and the fixed vector components in Frame B.
Taking the results directly from Figure C1-2 gives
 = (0.9659, 0.0, 0.0, 0.2588) <-------- Quaternion For Frame B
= (0.9659, 0.0, 0.0, 0.2588) <-------- Quaternion For Frame B VB = (0.9196, 0.3928, 0.0000) <-------ANSWER
These answers agree precisely with the manual solutions given above. This validates
the QuatView vector rotation calculations.
Case 2:
Case 2 considers the same input vector as Case 1, except that for Case 2 this vector
is rotated counterclockwise by an angle of q = 30° about the Z axis instead of being
fixed. The objective of this case is to determine the components of the rotated
vector with respect to Frame A.
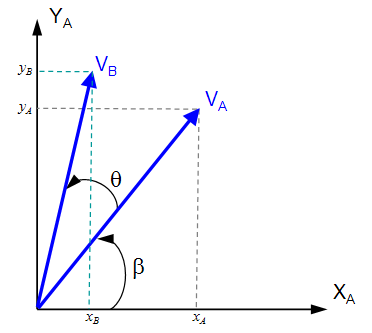
Figure C1-3 shows the vector in its unrotated (VA) and rotated (VB) orientations with
respect to Frame A. The angles q and b are also shown, where b =
53.13° is the
initial vector orientation angle prior to the rotation. The final orientation angle after
the rotation is then (q+b).
Figure C1-3. Verification Test 1, Case 3 - V Rotates With Frame B
The solution to this problem is computed manually using two methods: the DCM and
the rotation quaternion. The results from these methods are then compared against
the output from QuatView.
It turns out that Case 1 and Case 2 are closely related, with solution procedures that
are very similar. In fact, the DCM solution for Case 2 is the same as Case 1 with the
only difference being that the transpose of the Case 1 DCM is used for Case 2.
Likewise, the only difference with the quaternion solution is that the rotation
quaternion transpose for Case 2 appears on the LHS of equation C1-3 instead of on
the RHS.
A) DCM Solution:
The basic formula for rotating a vector is
 (C1-5)
(C1-5) where  is the DCM that defines the vector rotation from A to B. The simplest
way to derive this DCM is to relate the final and initial vector components in
accordance with Figure C1-3. As this figure shows, with a vector magnitude of unity
the initial vector components (xA,yA) are given by
is the DCM that defines the vector rotation from A to B. The simplest
way to derive this DCM is to relate the final and initial vector components in
accordance with Figure C1-3. As this figure shows, with a vector magnitude of unity
the initial vector components (xA,yA) are given by xA = cos(b)
yA = sin(b) (C1-6)
Similarly, the final vector components are given by
xB = cos(q+b)
yB = sin(q+b) (C1-7)
Using the trigonometric formulas for the sine and cosine of the sum of two angles
then yields
xB = cos(q+b) = cos(q)cos(b) - sin(q)sin(b)
yB = sin(q+b) = sin(q)cos(b) + cos(q)sin(b) (C1-8)
Substituting Eqns. C1-6 into C1-8 then gives
xB = xA cos(q) - yA sin(q)
yB = xA sin(q) + yA cos(q) (C1-9)
Putting Eqns. C1-9 into matrix format per Eqn. C1-5 then gives the DCM as
 (C1-10)
(C1-10) Plugging q=30° into Eqn. C1-10 then gives the following DCM:
Note that this DCM is simply the transpose of the DCM used for Case 1. This means
that expressing a fixed vector in a rotated reference frame is the transpose of
rotating the vector with respect to a fixed frame.
Performing the matrix multiplications in Eqn. C1-5 gives the rotated vector
components as
The requested vector components with respect to Frame B are then
VB = (0.1196, 0.9928, 0.0000) <-------ANSWER
B) Quaternion Solution:
The quaternion transformation formula for a rotating vector in a fixed coordinate
system is given by
 (C1-11)
(C1-11) where (VA) and (VB)
are pure quaternions containing the vector components VA and
VB,  is the rotation quaternion defining the orientation of Frame B with respect to
Frame A,
is the rotation quaternion defining the orientation of Frame B with respect to
Frame A,  is the quaternion multiplication operator, and * is the quaternion
conjugate operator. Note that this formula is similar to Eqn. C1-3 from Case 1 with
the only difference being that the rotation quaternion transpose is on the LHS
instead of the RHS.
is the quaternion multiplication operator, and * is the quaternion
conjugate operator. Note that this formula is similar to Eqn. C1-3 from Case 1 with
the only difference being that the rotation quaternion transpose is on the LHS
instead of the RHS. Using Eqn. C1-4, the rotation quaternion for a counterclockwise rotation from A to B
with q = 30°
is computed as
 = (0.9659, 0.0, 0.0, 0.2588)
= (0.9659, 0.0, 0.0, 0.2588) The pure quaternion for the input vector is the same as Case 1 which is given by
(VA) = (0.00, 0.60, 0.80, 0.00)
Plugging these values for (VA) and  into Eqn. C1-11 gives
into Eqn. C1-11 gives  = (0.9659, 0.0, 0.0, -0.2588)
= (0.9659, 0.0, 0.0, -0.2588)  (0.00, 0.60, 0.80, 0.00)
(0.00, 0.60, 0.80, 0.00)  (0.9659, 0.0,
0.0, 0.2588)
(0.9659, 0.0,
0.0, 0.2588) Performing the two quaternion multiplications in accordance with Eqn. 2 gives
 = (0.00, 0.1196, 0.9928, 0.00)
= (0.00, 0.1196, 0.9928, 0.00) Separating out the vector from the pure quaternion then gives the following final
answer for the vector components in Frame B:
VB = (0.1196, 0.9928, 0.0000) <-------ANSWER
This answer agrees precisely with the answer from the DCM solution, which is to be
expected.
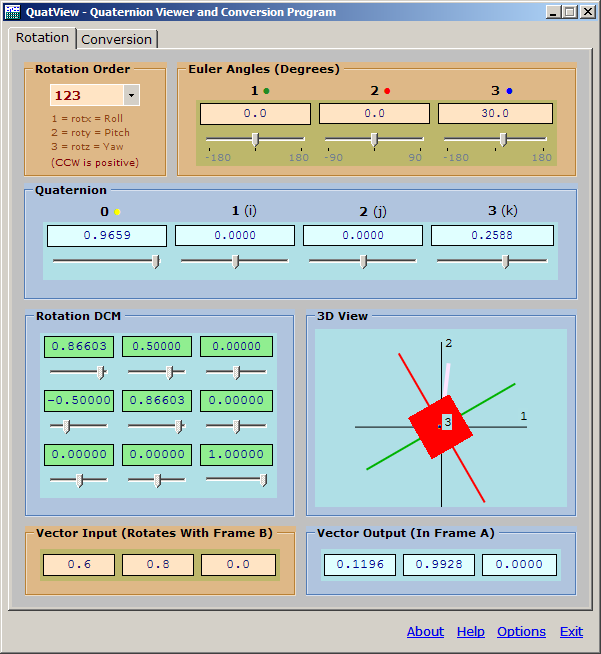
C) QuatView Solution:
Figure C1-4 shows the QuatView results for Case 2. The orientation of Frame B with
respect to Frame A is defined by the three Euler angles entered as (0.0, 0.0, 30.0).
The vector is entered in Frame A as (0.6, 0.8, 0.0). The vector initial reference
frame must be set to "Frame A (Fixed)" using the Options dialog. Vector plotting is
also turned on using the Options dialog.
Figure C1-4. QuatView Results For Case 2 (Rotated Vector in Fixed Frame)
Once the rotation angles and vector components are entered, then QuatView
automatically displays the complete solution which includes the Frame B rotation
quaternion and the rotated vector components with respect to Frame A.
Taking the results directly from Figure C1-4 gives
 = (0.9659, 0.0, 0.0, 0.2588) <-------- Quaternion For Rotated Vector
= (0.9659, 0.0, 0.0, 0.2588) <-------- Quaternion For Rotated Vector VB = (0.1196, 0.9928, 0.0000) <-------ANSWER
These results agree precisely with the manual solutions given above using the DCM
and quaternion methods. This validates the QuatView vector rotation
calculations.