What is a quaternion?
A quaternion is a mathematical abstraction just like a real number, complex number,
tensor, or manifold. A quaternion is basically a type of complex number that
consists of four values, one of which is real, while the other three are imaginary. As
such, quaternions are referred to as hypercomplex numbers. So, just like a complex
number consists of two parts (real and imaginary), the hypercomplex number
consists of four parts (1 real and 3 imaginary). The mathematical properties of
hypercomplex numbers are such that quaternions, when normalized, are ideally
suited for representing the orientation of an object in 3D space and for transforming
the orientation coordinates between any two 3D reference frames. Another name for
the normalized quaternion is the versor.
Several textbooks and internet references are available that provide detailed
descriptions of quaternions, including mathematically rigorous derivations of all the
relevant quaternion rules and formulas. A short list of quaternion references is given here. There are two common conventions for representing a quaternion: one has the real
component first and the other has the real component last. QuatView uses the
former convention with the following notation for the quaternion, q.
where,
A quaternion can be normalized just like a four dimensional vector by dividing each
of the four components by the Euclidean norm. The Euclidean norm is defined as the
square root of the sum of the squares of the four quaternion components.
Physical Interpretation
The normalized quaternion can be interpreted physically as an angle combined with a
3D axis about which a single rotation defines the final orientation of a frame relative
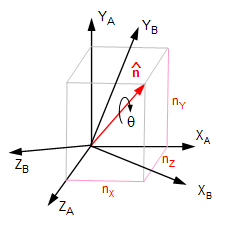
to some initial reference frame. According to Euler's rotation theorem, the
orientation of any object in 3D space can be defined by a single rotation about a
single axis. Figure 20 shows a rotation axis,  , and a rotation angle, q, about this
axis.
, and a rotation angle, q, about this
axis. Figure 20. Quaternion as rotation axis and angle
A quaternion can then be defined that represents a rotation from Frame A to Frame
B. That is, a quaternion can be defined that represents the orientation of Frame B
with respect to Frame A. The components of this quaternion are related to the
rotation axis and angle in Figure 20 according to the following formulas:
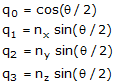 (1)
(1) where,
The scalar component of the quaternion gives the rotation angle, and the three
imaginary components, when normalized, give the direction of the rotation axis.
The rotation angle is then readily computed from the arc cosine of the quaternion
scalar component as
 (2)
(2) The quaternion has its own special set of mathematical operations so that it can be
used very effectively for simulating and predicting rotational motion.
Quaternion Product
The quaternion product is
perhaps the most important quaternion operation since it
is used extensively in vector transformation and rotational kinematics. It is also
used to compute the quaternion derivative. Multiplying two quaternions together is a
fairly complex process compared to vector multiplication. Separating each
quaternion into scalar and vector components, the formula for multiplying two
quaternions can be expressed as
 (3)
(3) where,
si = scalar (real) component for quaternion i
Vi = vector (imaginary) components for quaternion i
 = quaternion product
= quaternion product  = vector dot product
= vector dot product  = vector cross product
= vector cross product
This formula shows that the quaternion product requires five individual products
including a vector dot product and a vector cross product.
Quaternion Conjugate
The quaternion conjugate is similar to the conjugate for standard complex numbers
except that the quaternion has three imaginary numbers instead of only one. So the
quaternion conjugate is computed by reversing the sign of the three imaginary
components.
 (4)
(4) where,
q* = quaternion conjugate
 =
quaternion
=
quaternion s = real component
Vi = imaginary components (i = 1,2,3)
Quaternion Magnitude
The quaternion magnitude is a scalar value that is equal to the four dimensional
Euclidean norm which is simply the square root of the sum of the squares of the four
components.
 (5)
(5) where,
q =
quaternion, 
 =
quaternion magnitude
=
quaternion magnitude q* = quaternion conjugate
s = real component
Vi
= imaginary components (i = 1,2,3)
 = quaternion product
= quaternion product Quaternion Inverse
The quaternion inverse is computed by dividing its conjugate by its magnitude
squared as shown in the following formula:
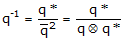 (6)
(6) where,
q =
quaternion
 =
quaternion inverse
=
quaternion inverse  =
quaternion magnitude
=
quaternion magnitude  = quaternion product
= quaternion product Normalized Quaternion
A quaternion must be normalized to represent a valid 3D orientation or to compute
valid vector rotations. Normalized quaternions, or versors, have the special property
that their conjugate is equal to their inverse. When quaternions are used in
numerical simulations to represent orientations, the quaternion must be
renormalized at frequent intervals to account for the accumulation of numerical
round off error. A normalized quaternion (or unit quaternion) is computed by simply
dividing the quaternion by its magnitude.
 ,
,  (7)
(7) where,
QN = normalized quaternion
q = unnormalized quaternion
 =
quaternion magnitude
=
quaternion magnitude Pure Quaternion
A pure quaternion is defined as a quaternion with a zero for the scalar value (q0=0).
A standard 3D vector can be readily stored in a pure quaternion. Pure quaternions
can then be used to rotate vectors or transform the vector coordinates between
different rotated reference frames.
Vector Transformation
The
components a vector can be transformed between any two different reference
frame orientations using the following formula:
 (8)
(8) where,
VA = vector (pure quaternion) in Frame A coordinates
VB = vector (pure quaternion) in Frame B coordinates
Q = normalized quaternion for orientation of Frame B relative to Frame
A.
Q* = conjugate (or
inverse) of Q
 = quaternion product
= quaternion product Quaternion Time Derivative
If the quaternion, q, represents the orientation of a rotating Frame B relative to
some other reference Frame A, then the quaternion rate or time derivative of this
quaternion can be expressed in terms of the corresponding angular velocity vector, w, that defines the rate at which Frame B rotates relative to Frame A. This angular
velocity vector can be expressed in terms of Frame A or Frame B coordinates as wA
or wB respectively.
The formula for the quaternion derivative is given by
 or
or  (9)
(9) where,
 = quaternion rate of Frame B relative to Frame A
= quaternion rate of Frame B relative to Frame A q = quaternion for Frame B orientation relative to Frame A
wA = angular velocity of Frame B in Frame A coordinates
wB = angular velocity of Frame B in Frame B coordinates
 = quaternion product
= quaternion product