|
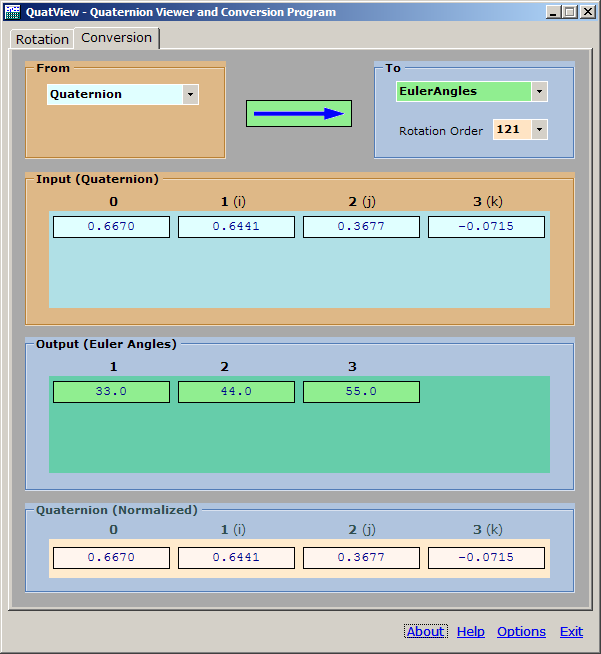
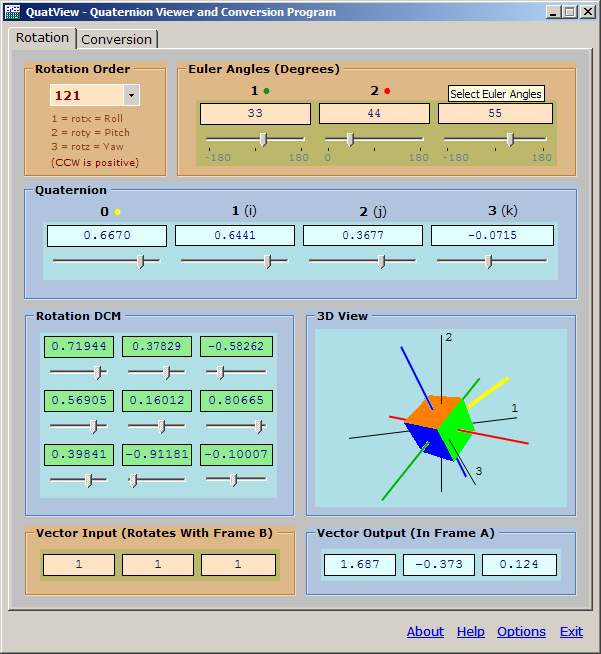
Test Problem 2 (Conversion From Euler Angles To Quaternion)
|
Previous Top Next |
Given:
Find:
Solution:
Table C2-1. Verification Test 2, QuatView Results
|
Rotation
Order
|
q0
|
q1
|
q2
|
q3
|
|
123
|
0.7394
|
0.3994
|
0.1970
|
0.5049
|
|
231
|
0.7394
|
0.3994
|
0.4402
|
0.3161
|
|
312
|
0.7394
|
0.0677
|
0.4402
|
0.5049
|
|
321
|
0.8377
|
0.0677
|
0.4402
|
0.3161
|
|
213
|
0.8377
|
0.3994
|
0.1970
|
0.3161
|
|
132
|
0.8377
|
0.0677
|
0.1970
|
0.5049
|
|
121
|
0.6670
|
0.6441
|
0.3677
|
-0.0715
|
|
131
|
0.6670
|
0.6441
|
0.0715
|
0.3677
|
|
212
|
0.6670
|
0.3677
|
0.6441
|
0.0715
|
|
232
|
0.6670
|
-0.0715
|
0.6441
|
0.3677
|
|
313
|
0.6670
|
0.3677
|
-0.0715
|
0.6441
|
|
323
|
0.6670
|
0.0715
|
0.3677
|
0.6441
|
Table C2-2. Verification Test 2, Matlab Results
|
Rotation
Order
|
q0
|
q1
|
q2
|
q3
|
QuatView
Match
|
|
123
|
0.7394
|
0.3994
|
0.1970
|
0.5049
|
Y
|
|
231
|
0.7394
|
0.3994
|
0.4402
|
0.3161
|
Y
|
|
312
|
0.7394
|
0.0677
|
0.4402
|
0.5049
|
Y
|
|
321
|
0.8377
|
0.0677
|
0.4402
|
0.3161
|
Y
|
|
213
|
0.8377
|
0.3994
|
0.1970
|
0.3161
|
Y
|
|
132
|
0.8377
|
0.0677
|
0.1970
|
0.5049
|
Y
|
|
121
|
0.6670
|
0.6441
|
0.3677
|
-0.0715
|
Y
|
|
131
|
0.6670
|
0.6441
|
0.0715
|
0.3677
|
Y
|
|
212
|
0.6670
|
0.3677
|
0.6441
|
0.0715
|
Y
|
|
232
|
0.6670
|
-0.0715
|
0.6441
|
0.3677
|
Y
|
|
313
|
0.6670
|
0.3677
|
-0.0715
|
0.6441
|
Y
|
|
323
|
0.6670
|
0.0715
|
0.3677
|
0.6441
|
Y
|